
5 Eksenli 3d Baskılı Robot Kol Projesi
Eğitim ve AR-GE amaçlı geliştirilen 5 eksenli robot kol projesi. İleri–ters kinematik hesaplamaları yapıldı, hareket algoritmaları yazılım tarafında uygulandı.
- ESP32
- C / C++
- Kinematik Hesaplamalar
- Fusion 360
Robotik sistemler, gömülü yazılım, simülasyon ve ürün geliştirme odaklı kişisel projelerimden seçmeler
Eğitim ve AR-GE amaçlı geliştirilen 5 eksenli robot kol projesi. İleri–ters kinematik hesaplamaları yapıldı, hareket algoritmaları yazılım tarafında uygulandı.

Joystick kontrollü, otomatik ve manuel modlara sahip motorlu kamera slider projesi.

Masaüstü yazılım üzerinden kontrol edilen 5 eksenli eğitim robotu.
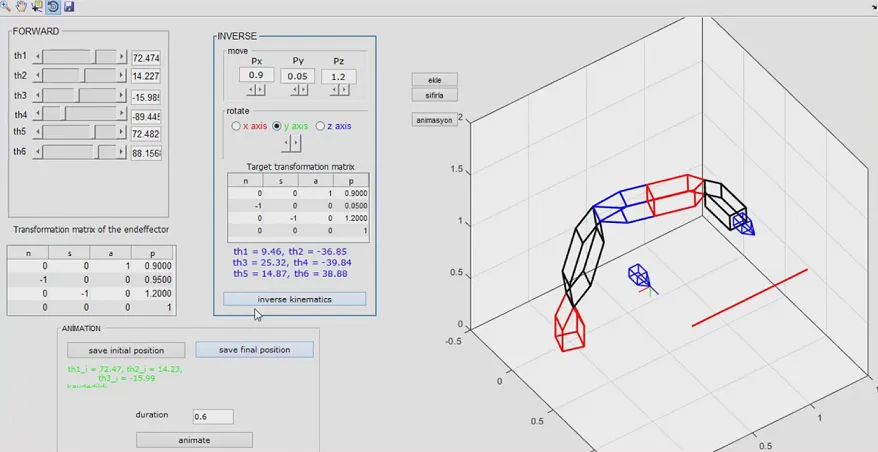
6 eksenli robot kol için ileri ve ters kinematik denklemleri çıkarılarak Matlab ortamında simülasyon geliştirildi.